KUKA机器人学习
示教器按键功能介绍

状态栏使用多的数据
S 解释器后台扫描运行的程序
I 通俗理解为上电下电
R 程序复位到上一步,或者退出程序
T1 表示机器人当前的运动模式
程序运行
按选定可以运行程序
按打开可以查看内容
菜单
查看输入输出
菜单-->显示-->输入/输出端查看/修改机器人ip地址
1.菜单-->投入运行-->网络配置
2.菜单-->关机-->重新启动控制系统pc查看机器人的实际位置
菜单-->显示-->实际位置选型
选型要素 负载 臂展(工作范围)
机器人定点
定点规则
命名规则:
R1C1P1
R1 层
C1 从左到右第几位
P1 每一位有几个点点位数量
一般点位数量在4到5个
一般抓取点间隙比较小的都是4个点就可以,托盘的这种夹具一般需要5个点
抓取点外点
抓取点近点(看情况这个点可以省略)
抓取点
抬升点
抬升点外点定点类型
1.厍位点
2.需要机器人动作的工作台点
3.厍位的home点
4.机床、工作台的home点
4.机器人轨迹修正的home点机器人定位准确的前提是机器人抓取的产品的位置和放产品的位置,相对于机器人夹爪来说夹住是同一位置,
取和放的点夹住的位置不一样,机器人的误差就会变大
系统参数
PTP $POS_ACT:执行一个点对点(PTP,Point-to-Point)运动,目标位置是当前位置($POS_ACT)
WAIT FOR $T1:等待手动模式
WAIT FOR $EXT:等待外部控制模式机器人定位不准
机器人定位准确的前提是机器人抓取的产品的位置和放产品的位置,相对于机器人夹爪来说夹住是同一位置, 取和放的点夹住的位置不一样,机器人的误差就会变大
机器人定位不准的原因
机器人遭受撞击机构/工具变形
机器人伺服电机出现反馈传感器故障、驱动器配置错误、编码器损坏等问题通常会导致机器人运动不精确或完全无法运动,影响其操作效率和精度。运动
手动运动
1.调整到轴运动模式进行单个轴的运动
2.调整到工具坐标进行工具的三轴运动,通过左右偏,前后翻转,左右反转来调整工具姿势
程序运动
点到点运动PTP
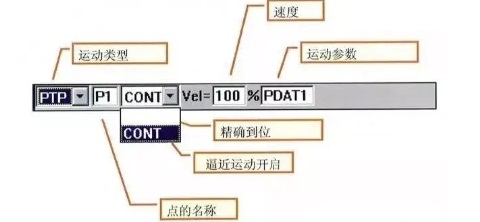
PTP
机器人运动到输入位置
PTP {A1 0, A2 -80, A3 75, A4 30, A5 30, A6 110}
空间位置 (以当前激活的工具和基坐标)
PTP {X 100, Y -50, Z 1500, A 0, B 0, C 90, S 3, T3 35
机器人仅在输入一个或多个集合时运行
PTP {A1 30} ; 仅 A1 移动至 30°
PTP {X 200, A 30} ; 仅在X至200mm, A至30°
PTP和SPTP区别
运行速度区别不大
PTP的使用范围除普通的程序模块以外还可以用在一些特殊场合,比如中断程序。
SPTP则不能使用于中断程序内。
PTP和SPTP出现在同一个模块内一起使用的话在两个指令过度的时候机器人有时会出现抖动一下。
PTP在非联机表单的形式使用时必须提前赋值相关的工具,基座标,速度,加速度等。
SPTP则可以更方便的进行变量赋值。或者根本不写也会以上一条运动指令的变量进行赋值运动。如果上面没有运动指令就会在INI行进行。
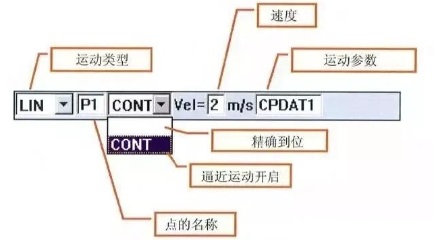
线性运动LIN
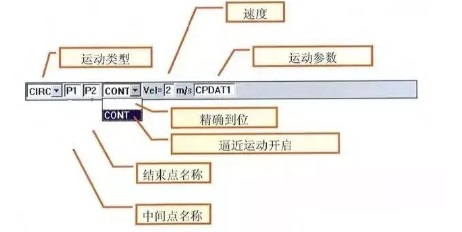
圆周运行CIRC
运动安全性
在间隙比较小的地方运动时进出速度要慢,能提高一点稳定性
在进行机器人运动之前先检查机器人位置和夹具的状态等
外部控制运动
BCO
库卡机器人启动时候,会低速运行到点位,当机器人到达点位以后会停止并且报已达BCO,这里BCO是让机器人首次运行运行时候到达安全点位pHome,确保机器人安全,这时候我们还需要再次按下启动按键,机器人正式正常运行程序;
注意:BCO 是 B Block coincidence (即程序段重合)的缩写。 重合意为 “ 一致 ” 及 “ 时间 / 空间事件的会合 ”。如果选定的运动语句包括 PTP 运行指令,则 BCO 运行将作为PTP 运动从实际位置移动到目标位置。 如果选定的运动语句包括 LIN 或 CIRC,则 BCO 运行将作为 LIN 运动被执行。 观察此运动,防止碰撞。 在 BCO 运行中速度自动降低。
编程
变量的声明和初始化
在 SRC 文件中声明和初始化
DEF MY_PROG ( )
DECL INT counter
DECL REAL price
DECL BOOL error
DECL CHAR symbol
INI
counter = 10
price = 0.0
error = FALSE
symbol = "X"
...
END在 DAT 文件中声明和初始化
DEFDAT MY_PROG
EXTERNAL DECLARATIONS
DECL INT counter = 10
DECL REAL price = 0.0
DECL BOOL error = FALSE
DECL CHAR symbol = "X"
...
ENDDAT在DAT 文件中声明和在 SRC 文件中初始化
DAT文件中声明
DEFDAT MY_PROG
EXTERNAL DECLARATIONS
DECL INT counter
DECL REAL price
DECL BOOL error
DECL CHAR symbol
...
ENDDATSRC 文件中初始化
DEF MY_PROG ( )
...
INI
counter = 10
price = 0.0
error = FALSE
symbol = "X"
...
END常量的声明和初始化
在DAT文件中
DEFDAT MY_PROG
EXTERNAL DECLARATIONS
DECL CONST INT max_size = 99
DECL CONST REAL PI = 3.1415
...
ENDDAT设置点的全局应用
全局点
示教器管理者模式添加全局点全局点权限
全局声明
在dat文件中DEFDAT xxx 后面添加 public 在确定点DECL 之后添加 global
全局方法
全局方法可以被任何方法调用
&ACCESS RV
DEF GRPS ( )
;FOLD INI;%{PE}
;FOLD BASISTECH INI
GLOBAL INTERRUPT DECL 3 WHEN $STOPMESS==TRUE DO IR_STOPM ( )
INTERRUPT ON 3
BAS (#INITMOV,0 )
;ENDFOLD (BASISTECH INI)
;FOLD USER INI
;Make your modifications here
;ENDFOLD (USER INI)
;ENDFOLD (INI)
END
GLOBAL DEF GRPS_DIANJI_OPEN ()
;电极$IN[3]和$OUT[4]在设置的时候对应的是同一信号
$OUT[3]=FALSE
$OUT[4]=TRUE
WAIT SEC 0.1
WAIT FOR (NOT $IN[4]) AND $IN[3]
WAIT SEC 0.5
END
GLOBAL DEF GRPS_DIANJI_CLOSE ()
$OUT[4]=FALSE
$OUT[3]=TRUE
WAIT SEC 0.1
WAIT FOR (NOT $IN[3]) AND $IN[4]
WAIT SEC 0.5
END
GLOBAL DEF GRPS_TUOPAN_OPEN ()
$OUT[2]=FALSE
$OUT[1]=TRUE
WAIT SEC 0.1
WAIT FOR (NOT $IN[2]) AND $IN[1]
WAIT SEC 0.5
END
GLOBAL DEF GRPS_TUOPAN_CLOSE ()
$OUT[1]=FALSE
$OUT[2]=TRUE
WAIT SEC 0.1
;等待 NOT $IN[1] 等于 true($IN[1]需为false) 并且 $IN[2] 等于 true
WAIT FOR (NOT $IN[1]) AND $IN[2]
WAIT SEC 0.5
END
plc控制机器人动作的原理
plc通过和机器人建立通讯以外部控制的方式来给机器人下达指令,通过程序号控制机器人要执行的逻辑,通过确定好的点位和输入输出信号,控制机器人具体的动作
WorkVisual 6.0 项目配置
下载
库卡机器人使用WorkVisual 6.0 下载需要对应库卡机器人的kop文件
包括EthernetKRL、 KUKA.PROFINET MS、UserTech等文件
io名称修改
编辑器-->长文本编辑器更改完之后下载