FANUC发那科工业机器人学习
FANUC发那科机器人项目的实施流程
开始
-->项目分析
-->是否进行了机器人组装
-->是否进行了系统配置
-->是否建立了坐标系
-->是否进行了I/O信号配置
-->是否编程
-->是否自动运行
-->结束安全启动流程
检查接线是否正确
启动控制柜模式切换到T1
有效开关拨动至ON
FANUC机器人本体组成
工业机器人的机械主体,主要由机械臂、驱动装置、传动装置和内部传感器组成。对于六轴机器人而言,其机械臂主要包括基座、腰部、手臂(大臂和小臂)和手腕
控制器(控制柜)
控制器组成
操作面板
断路器
连接电缆
散热风扇
usb端口
断路器
ON
上电,无法打开控制器柜门
OFF
将其旋转至“OFF”,并继续逆时针转动一段距离,才能打开柜门,此时无法启动控制器
操作面板
左侧旋钮模式开关
模式:
T1模式:手动控制,机器人只能低速运行,小于250mm/s的速度
T2模式:手动控制,机器人可以全速运行
AUTO:成产状态下使用
中间是启动开关
启动当前所选的程序程序启动中亮灯
右侧是急停按钮
按下按钮使机器人立即停止。向右旋转急停按钮即可解除按钮锁定
示教器
示教器的指示灯
POWER
上电指示灯
FAULT
报警指示灯
示教器硬件介绍
左上角盘示教器有效开关
右上角是急停按钮
安全开关
安全开关(示教器背后黄色按钮)
有三种状态:全松、半按全按 ,半按状态有效,全松和全按时,将无法执行机器人操作
按键介绍
按键
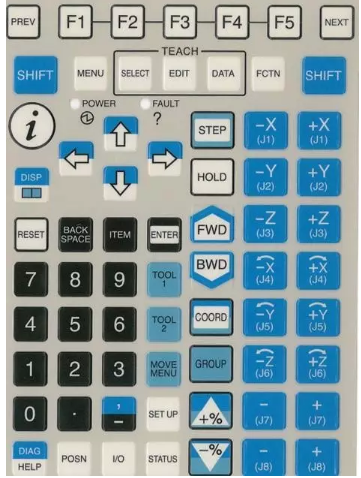
示教器操作键
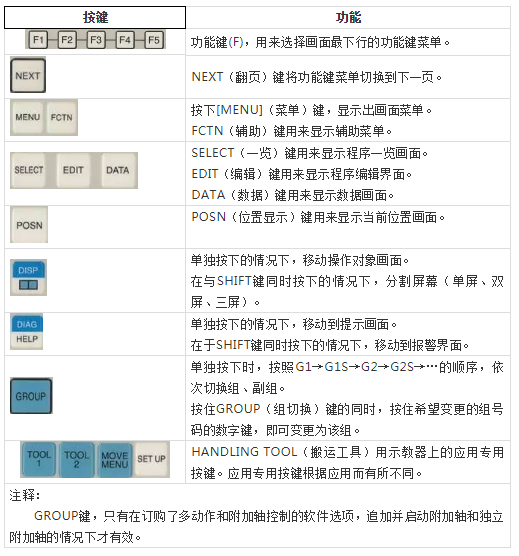
示教器应用键

与点动相关按键

与执行相关按键

设置示教器显示语言
1.按MENU键向下选择SETUP
2.选择第二栏第二个选项 General 点enter键进入功能
3.选第二个选项按F4在新探窗中选择chinese点enter确定
示教器画面
状态窗口
示教器的显示画面的上部窗口,状态窗口,上面显示8个软件LED、报警显示、倍率值。带有图标的显示表示ON 不带图标的显示表示OFF
状态显示及含义
处理
机器人正在进行某项作业
单段
处在单段运转模式下
暂停
按下了HOLD(暂停)按钮,或输入了HOLD信号
异常
发生了异常
运转
应用程序固有的LED
测试中
应用程序固有的LED
I/O
应用程序固有的LED
实行
正在执行程序
MENU菜单含义
MENU菜单1
1.实用工具:使用各类机器人功能
2.试运行:进行测试运转的设定
3.手动操作:手动执行宏指令
4.报警:显示发生的报警和过去报警履历以及详细情况
5.I/O:进行各类I0的状态显示
6.设置:进行系统的各种设定
7.文件:进行文件的加载保护
8.用户:在执行消息指令时显示用户消息
MENU菜单2
1.一览:显示程序一览画面
2.编辑:进行程序的示教、修改、执行
3.数据:显示数值寄存器、位置寄存器和码垛寄存器的值
4.状态:显示系统的状态
5.4D图形:显示3画面。同时显示现在位置的位置数据
6.系统:进行系统变量的设定、零点标定的设定等
7.用户2:显示从KAREL程序输出的消息
8.浏览器:进行网络上的Web网页的浏览
辅助菜单应用,画面分割
FCTN(辅助)键用来显示辅助菜单
辅助菜单1
中止程序:强制结束执行中或暂停中的程序
禁止前进后退:禁止或解除从示教器启动程序
解除等待:跳过当前执行中的等待指令
辅助菜单2
简易/全画面切换:用来切换通常的画面菜单和快捷菜单
保存:将与当前显示的画面相关的数据保存在外部存储装置中
打印画面:原样打印当前所显示的画面
打印:用于程序、系统变量的打印
所有的IO仿真解除:解除所有IO信号的仿真设定
重新启动:可以进行再启动(重新启动有三种模式:热启动,冷启动,控制启动)
启用HMI菜单:按下MENU键时,选择是否显示HMI菜单
辅助菜单3
更新面板:进行画面的再次显示
诊断记录:发生故障时记录调查用数据(发生故障时请在电源置于OFF前记录下来)
划除诊断记录:删除所记录的调查用数据
DISP键和SHIFT键同时按下就可以分屏
查看事件日志
MENU键 选择报警就可以查看日志类型
进入日志后可以按F1键切换其他的日志类型
清除报警
使用SHIFT+RESET键清除示教器报警
手动操作关节运动
长按COORD键将示教坐标切换至关节
左手按下安全开关,RESET键清除开关时产生的报警信息
按+%增加机器人运动速度,按-%减少机器人的运动速度
长按SHIFT键同时按j1-j6,进行六轴关节运动
手动操作直角运动
长按COORD键将示教坐标切换至世界
左手按下安全开关,RESET键清除开关时产生的报警信息
长按SHIFT键同时按XYZ就会就行X轴Y轴和Z轴的相关运动
为什么会出现奇异点?
报警信息显示在奇异点附近报警信息时,就出现奇异点,奇异点出现的原因是4轴轴线和六轴轴线平行时导致的
出现奇异点如何解决?
左手按下安全开关,RESET键清除开关时产生的报警信息
长按COORD键将示教坐标切换至关节,将机器人恢复到一个安全位置,再切换到世界,将机器人移动至想要移动到的位置
工具坐标系的认识和建立
工具坐标系是表示工具中心和工具姿势的直角坐标系,需要在编程前
先进行自定义。未定义工具坐标系时,将被默认工具坐标系所取代。
注意:工具坐标系是为适应机器人的末端执行机构机构(如机器人夹爪、快换工具等)而专门建立的
工具坐标系建立
三点法
接近点1
接近点2
接近点3
三点法示教只可以设置工具中心点 ,不可以设置工具位姿
示教时为了正确设定坐标系,应尽量使三个趋近方向各不相同
使用 SHIFT+F5 纪录点
三点设定完成后系统自动计算工具中心点
六点法
接近点1
接近点2
接近点3
坐标原点
X方向点
Y方向点
与三点法一样的设定工具中心点,然后设定工具姿势。设定工具姿势时使用直角坐标系进行示教,保持工具姿势不变。
验证工具坐标系
MENU-->设置-->坐标系-->F3-->工具坐标系-->F5键切换-->输入要验证的工具坐标系编号,然后手动控制工具xyz三方向移动还有第六轴的xyz方向移动工具坐标系建立步骤
准备工作
坐标系标定工具安装在法兰盘末端
选取基础模块的尖端点作为固定点
MENU-->设置-->坐标系-->F3-->工具坐标系-->移动光标至想要建立坐标系的编号-->F2-->六点法XY-->移动光标至接近点1-->按SELECT-->选择程序以第一种姿态移动到接近点-->MENU-->设置-->使用 SHIFT+F5 纪录点
接近点1接近点2接近点3使用一样的方法记录点
坐标原点可以设置成接近点3
X方向点在坐标原点基础上按SHIFT+ENTER然后SHIFT+X在X轴正方向移动-->使用 SHIFT+F5 纪录点-->移动光标至坐标原点-->按SHIFT+F4
移动到坐标原点-->光标移动至Y方向点定点和X方向点一样的操作,显示以计算新位置表示设置完成用户坐标系的认识和建立
用户坐标系是用户对每个作业空间进行定义的直角坐标系。用户坐标
系在尚未设定时,将被世界坐标系所取代。
设定方法
三点法
示教3点,即坐标系的原点、X轴方向的1点、XY平面上的1点(Y轴方向的1点)进行示教。
不可改变机器人的姿态
Y方向点表示在XOY平面上一点
四点法
示教4点,即平行于坐标系的X轴的始点、X轴方向的1点、XY平面上的1点(Y轴方向的1点)、坐标系的原点进行示教。
直接输入法
直接输入相对世界坐标系的用户坐标系原点的位置x、y、2、和世界坐标系的X轴、Y轴、Z轴周围的回转角w、p、r、的值。
验证用户坐标系
MENU-->设置-->坐标系-->F3-->用户坐标系-->F5键切换-->输入要验证的用户坐标系编号-->ENTER-->长按COORD键将示教坐标切换至用户,然后手动控制工具xyz三方向移动还有第六轴的xyz方向移动用户坐标系建立步骤
准备工作
坐标系标定工具安装在法兰盘末端
选取基础模块用于建立用户坐标系
MENU-->设置-->坐标系-->F3-->用户坐标系-->移动光标至想要建立坐标系的编号-->F2-->三点法-->选择坐标原点-->SELECT选择程序-->ENTER-->光标移动至第一行-->FWD启动程序-->ENTER-->使用SHIFT+F5 纪录点
X轴方向点、Y轴方向点操作一样IO种类和类别
I/O种类
通用I/O
数字I/0
属通用数字信号,从外围设备通过处理,分为数字量输入DI[i]和数字量输出DO[i],有ON和OFF
组I/O
分为GI[i] /GO[i],信号的值用数值(10/16进制数)来表达,转变或逆转变为2进制数后通过信号线交换数据。
模拟I/O
分为模拟量输入AI [i] 和模拟量输出AO[i],进行读写时,将模拟输入/输出电压值转化为数字值
专用I/0
机器人I/O
机器人I/O是经由机器人,作为末端执行器I/O被使用的机器人数字信号。分为机器人输入信号RI[i]和机器人输出信号RO[i]。
外围设备IO
外围设备I/O(UI/UO),是在系统中已经确定了其用途的专用信号。分为外围设备输入信号UI [i]和外围设备输出信号UO[i]。
操作面板I/O
操作面板I/O,是用来进行操作面板操作箱的按钮和LED状态数据交换的数字专用信号。分为输入信号SI[i]和输出信号sO[i].分配方法
概念
机架:指IO模块的种类
48-R-30IB Mate的主板(CRMA15、CRMA16)
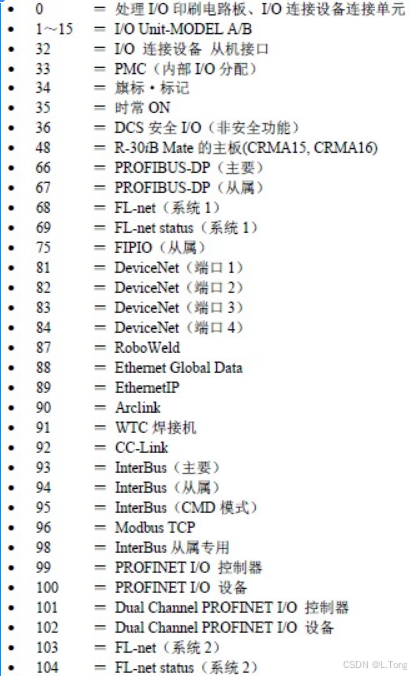
插槽:指构成机架的I/O模块的编号
IO连接设备从机接口、R-30i Mate 的主板(CRMA15、CRMA16)中,改值始终为1
分配
在进行 I/O 分配时,需要设定机架号、插槽和开始点。
MENU-->I/O-->数字-->F3切换数字输入和输出-->F2进入分配界面—-->状态显示PEND的时候表示分配成功,重启添加修改发那科机器人添加外部轴
FSSB路径
FSSB的作用
- 数据传输:传输伺服控制指令、编码器反馈数据等。
- 设备连接:串联机器人的伺服放大器、电机、I/O模块等。
- 实时性:高实时性通信,确保运动控制的精度和同步性。
FSSB路径的组成
FSSB路径通常包括以下硬件组件:
- 控制柜(如R-30iB):主控制器生成控制信号。
- 伺服放大器(Servo Amplifier):驱动伺服电机。
- 伺服电机(Servo Motor):内置编码器反馈位置/速度。
- 终端电阻(Terminator):用于阻抗匹配,防止信号反射。
FSSB路径的典型连接拓扑
控制柜(Master) → 第1轴伺服放大器 → 第2轴伺服放大器 → … → 末端放大器(需终端电阻)- 串联结构:FSSB采用菊花链(Daisy Chain)方式连接,所有设备通过光缆或电缆串联。
- 终端电阻:路径末端的放大器需安装终端电阻(通常为跳线或拨码开关设置)。
FSSB路径设置步骤
(1) 硬件连接
- 使用专用光缆(如A660-8001-T010)或电缆连接控制柜与放大器。
- 确保终端电阻正确配置(末端放大器上的终端电阻开关设为ON)。
(2) 软件配置
- 进入FSSB设定界面:
- 示教器上依次选择:
MENU → 系统 → 配置 → FSSB。
- 示教器上依次选择:
- 设定放大器编号(Axis No.):
- 为每个伺服放大器分配轴号(如1~6轴)。
- 电机ID设置:
- 确保电机ID与放大器编号匹配(需与硬件连接顺序一致)。
- 保存并重启:
- 保存配置后重启控制器生效。
在FANUC机器人系统中,确定外部轴抱闸号(Brake Number)的步骤如下:
1. 确认外部轴类型
- 伺服电机型外部轴:通常需要配置抱闸信号(如导轨、变位机等)。
- 气动/液压型外部轴:可能无需抱闸信号。
2. 查看硬件连接
- 抱闸线连接端口:外部轴的抱闸线通常连接到FANUC控制柜的 CRR65A/B(伺服放大器)或 I/O模块(如数字输出DO)。
- 放大器编号:外部轴对应的伺服放大器编号(如1
3轴是放大器1,46轴是放大器2,依此类推)。
3. 系统参数配置
- 抱闸信号分配:
- 进入 MENU → 6. SYSTEM → F1 [TYPE] → Brake。
- 找到外部轴对应的抱闸参数(通常为 BRKXXX,XXX代表轴号,如BRK007表示第7轴)。
- 抱闸号一般与 轴号+偏移量 相关(例如第7轴抱闸号可能是7或6,取决于系统配置)。
- I/O分配(如使用DO):
- 进入 MENU → I/O → Digital。
- 查看外部轴抱闸对应的DO地址(如DO[102]),需与电气图纸一致。
4. 参考外部轴配置文件
- 在 SYSTEM → CONFIG 中检查外部轴的机械编号(Mech No.)和组号(Group No.)。
- 抱闸号通常与机械编号或组内轴顺序相关(例如组2的第1轴抱闸号可能是5)。
5. 测试验证
- 手动释放抱闸(通过I/O或参数强制)观察外部轴是否可自由移动。
- 使用 MCR.*MCR*.BRK_RELEASE 系统变量监控抱闸状态。
常见示例
- 第7轴(单外部轴):
- 抱闸参数:
BRK007(值通常为7)。 - 对应DO信号:
DO[102](需根据实际配置确认)。
- 抱闸参数:
- 第7~9轴(组2):
- 抱闸号可能为5、6、7(与组内轴顺序相关)。
外部轴 单机+一轴变位机
轴控制卡–FSSB路径1–1号放大器(焊接机器人)–2号放大器(电机)
1.设定参数
| 运动组 | FSSB路径 | FSSB第1路径总轴数 | 硬件开始轴 | 放大器号 | 抱闸号 |
|---|---|---|---|---|---|
| 1 | 1 | 无 | 1 | 1 | 1 |
| 2 | 1 | 无 | 7 | 2 | 3 |
注释:运动组2的抱闸号取决于抱闸线的连接
2.需要添加的软件
| Basic Positioner | A05B-2500-H896 |
|---|---|
| Multi-Group Motion | A05B-2500-H896 |
3.步骤
执行控制启动操作
PREV(返回)和NEXT键 的同时接通电源
选择Controlled start 进入控制启动
按下MENUS 选择 MAINTENANCE(机器人设定)
按下F4 MANUAL(手动),进入FSSB路径设定界面
由于组2走的是第一路径,输入当前默认值为1
按下enter进入轴开始号设定界面
第一组 看机器人是几轴机器人 如果是6轴,第二组就设置成7
按enter 进入运动学类型设置界面
如果知道定位器在各轴间的偏置量的情况下选择1(运动学已知),不清楚的情况下,选择2(运动学未知),一般选2
按enter进入设定界面
要显示或者修改输入1
要添加轴,输入2
要删除轴输入3
退出选择4
要添加一个外部轴,输入2,按enter进入马达设置界面
一般情况下选择1:standard method 按enter进入马达设置界面,(如果没有当前匹配的马达型号,输入0.next.page,继续选择)这里以aiF22/3000为例
输入0.next.page 按enter进入
输入105:aiF22,按enter进入马达转速选择界面
输入2./3000,按enter进入方法器电流选择界面
输入7:80A,按enter进入放大器编号设定界面
输入2,按enter进入放大器种类设定界面
1为机器人六轴放大器
2为外部轴放大器
输入2,按enter进入轴运动类型设置界面
1直线运动
2旋转运动