电气系统
自动化设备主要组成
大脑:PLC
左右手:气缸和电机
气缸和电机 都可以实现自动化设备的 夹取 平移 旋转
气缸 用 气动夹爪,拉杆气缸,回转气缸 实现
电机 用 电动夹爪,直线电机,DD马达 实现
气缸系统:
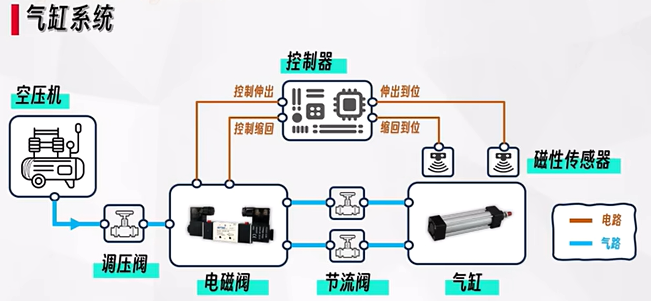
气缸与电磁阀的工作原理
气缸:
组成:腔体,活塞,推杆
汽缸是用流体推动活塞
分类:
单作用气缸
单作用气缸,只有一侧气路,气路控制伸出,弹簧控制缩回
缺点:行程不大,弹簧还会阻挡气缸伸出
双作用气缸
双作用气缸,两侧都有气路,一侧气路控制伸出,另一侧控制缩回
配合齿轮。齿条,就可以实现伸缩,旋转,开合电磁阀:
作用:控制气缸伸缩/进退
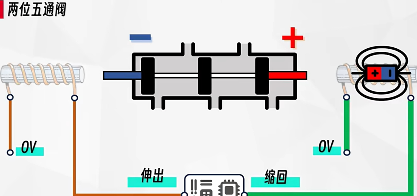
先导式的电磁阀主阀芯是气动的,线圈控制的是先导阀阀芯
两位五通电磁阀,阀芯的两侧装上磁铁吗,阀体的两侧固定两个线圈,通过plc发出电信号同性相斥,就可以轻松控制电磁阀阀芯
两位五通电磁阀有单双控之分,单控就是把一侧换成弹簧
磁性开关:
反馈气缸位置
磁簧式磁性开关工作原理:气缸的活塞上会有一个环形磁铁,当活塞到指定位置,磁簧的簧片会磁化吸合,此时LED发光,PLC也会收到电信号
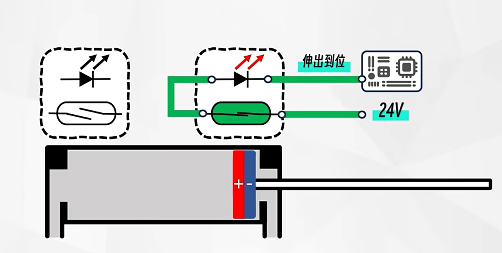
磁簧是触点式的传感器,还有非触点式的
磁簧优点是便宜,缺点是会被高频震动干扰
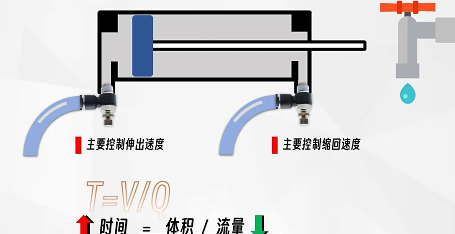
节流阀:
伸缩太慢会影响节拍,伸缩太快会造成机器抖动
通常装在气嘴上,空间窄时会串接在气管上
作用:调节气缸运行的速度
工作原理:
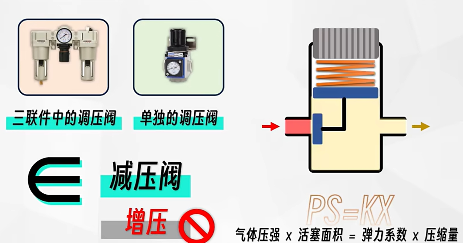
调压阀:
气缸压力过小可能会造成机械卡顿,压力过大可能会损坏物料
作用:调节气缸压力
一般总进气口会有一个三连过滤器,可以控制设备的总气压,单个设备需要控制气压的 话,可以单独加一个调压阀
工作原理:
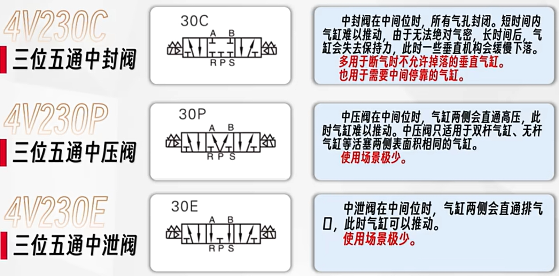
三位电磁阀:
两位五通阀只能两种状态一种是完全缩回,一种是完全伸出,控制气缸停止的位置,需 要用到三位五通阀,三位五通阀的阀芯两侧各有一个弹簧 可以让弹簧处于中间位置
作用:提供更多的工作模式
工作原理: 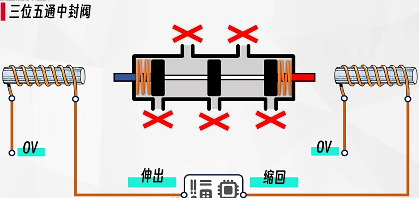
分类:
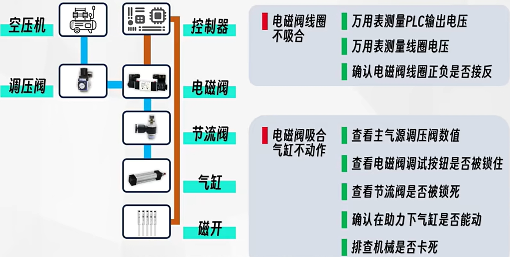
气缸故障排查思路
电机:
分类:
绕组数量
单相电机/三相电机
电源种类
交流电机/直流电机
磁力来源
永磁电机/感应电机
磁场-转子速度
异步电机/同步电机
功能
发电机/电动机
用途
驱动电机/控制电机
有无电刷
有刷电机:通过直流电源电压驱动,使用电刷和换向器进行换向,结构简单,但成本较低。
无刷电机:需要通过控制器进行电子换向,无需电刷,转速稳定,但系统复杂度和成本较高。无刷电机的结构中,绕组保持与电路相连,电磁体成为定子,永磁体成为转子电机工作流程:
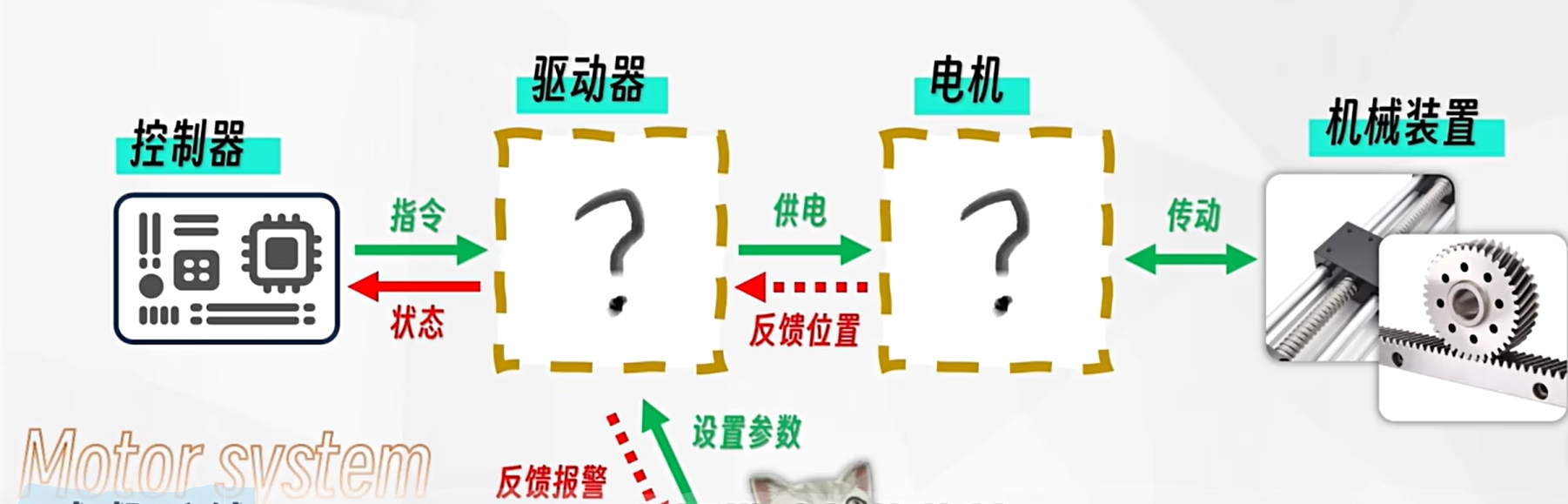
电机控制方案:
接触器控制交流电机
调速器控制调速电机
变频器控制变频电机
步进驱动器控制步进电机
伺服驱动器控制伺服电机
电机控制的具体内容主要分为 3类:
速度控制 位置控制 转矩控制
电机控制场景:
直接控制使用空气开关直接控制
通过信号控制
需要使用接触器:通过控制器发出信号控制接触器触点的断开吸合来控制电机动作(正反转)影响电机速度的因素:
极对数
电压:调速器通过电压来调速
电源频率:变频器通过改变频率调速旋钮式的调速器只能通过手动去改变电机速度,不能使用电信号调节
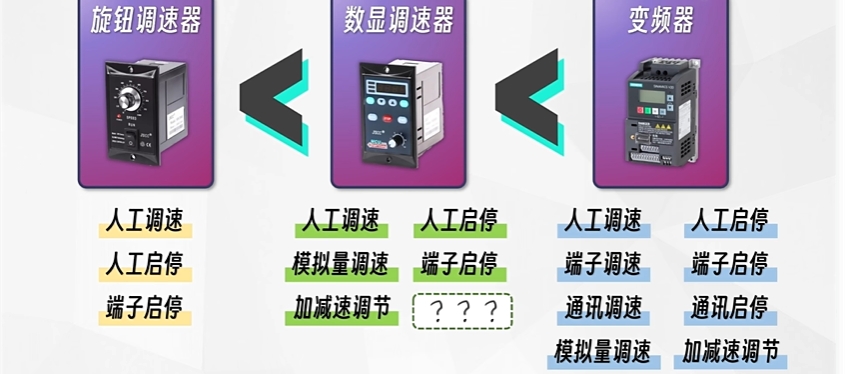
变频器可以通过多种控制方式进行调速:
设置好运转指令来源可以通过下面这几种方式控制电机启停
操作面板
端子
通讯协议
设置好频率来源就可以使用
面板按钮
端子
模拟量
电位器
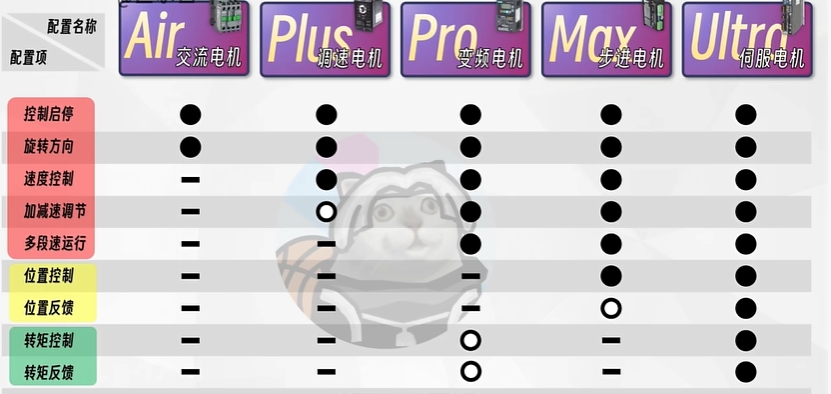
通讯协议电机功能比较:
步进电机与伺服电机:
步进电机、伺服电机与变频器的区别是增加了位置控制
位置控制作用是电机走到某个精确的位置停下来
plc将位置指令发给驱动器主要靠脉冲或者通讯
编码器:检测电机的转轴和转速
脉冲控制伺服:

实现精准的位置控制的几个主要部分:
plc:
plc指令:发布指令
plc脉冲发送模块:下发指令
驱动器:
驱动器脉冲接收模块:接收指令
驱动器电机控制模块:执行指令
电机编码器:
编码器:监督工作常用运动控制指令:
点动
绝对定位
相对定位
回原点
指令怎么传递给驱动器?
使用脉冲:电信号从无到有再到无这样的一个起伏就是脉冲
脉冲是怎么表示位置和速度?
在轴对象硬件设置中
可以设置每旋转一周对应多少行程,取决于减速机的减速比,丝杆的导程等参数
可以设置每转一圈会发出多少脉冲
plc用发送脉冲的数量实现对位置的控制
plc用发送脉冲的频率实现对速度的控制
正反转如何实现的?
脉冲+方向模式
就是再加一个控制正反转的信号,通过这个信号(例如红灯亮灭)来控制正转或者反转,通过绿灯来决定位置和速度
双脉冲模式
红灯的脉冲表示反转,绿灯的脉冲表示正向
AB向模式
红灯超前的脉冲表示反转
绿灯超前的脉冲表示正向
伺服正常工作条件:
PLC与驱动器支持该模式
两侧模式设置一致
接线方式正确
总线通讯控制伺服:
plc和驱动器建立通讯以报文的形式批量交互数据
西门子111报文,plc和驱动器每个周期都会互发24字节的数据
伺服电机怎么依照指令运行到指定的角度?
通过控制电流的反向和大小就可以实现基础的定位功能
伺服驱动的区别:
开环控制:磁力传动的方式不稳定当机构阻力较大时就会出现打滑的情况,没有反馈机制,在控制器的一侧无法真正了解电机有没有旋转到位,不完全可控
伺服与步进相比最大的特点就是闭环
伺服电机的尾部会有一个编码器
常见的增量式编码器向驱动器反馈的是AB相脉冲信号,驱动器通过编码器反馈的脉冲数判断伺服有没有运行到位,如果没有到目标位置伺服驱动器会持续给电机电流
| 伺服电机 | 步进电机 |
|---|---|
| 闭环控制 | 开环控制 |
| 响应速度快 | 响应速度慢 |
| 低速下无振动 | 低速下有振动 |
| 高速扭矩恒定 | 高速扭矩变小 |
| 支持过载 | 不支持过载 |
| 贵 | 便宜 |
伺服控制 EPOS模式
断开伺服电机负载,驱动器模式改为EPOS(基本定位器控制)使用FB284 (SinaPos)的方式进行控制
伺服探针是什么?
一种用于测量和检测的高精度工具
主要特点
- 高精度:伺服系统能精确控制探针位置,确保测量结果准确。
- 自动化:可集成到自动化系统中,减少人工干预,提升效率。
- 多功能:适用于多种测量任务,如尺寸、形状、位置等。
- 实时反馈:提供实时数据,便于及时调整。
工作原理
伺服探针通过伺服电机驱动探针移动,传感器实时反馈位置信息,控制系统根据反馈调整探针位置,确保测量精度。
裁切流程中如何进行伺位置修正
探针信号源设置成色标的输入信号
色标传感器接入伺服的DI点,设定探针功能设定位上升沿触发 ,伺服读取当前位置根据位置偏差信息让PLC进行补偿,通常采用位置叠加MC—SuperImpose指令,补偿值是每周期读取伺服探针的差值
丝杆导轨
凸轮分割器
IGBT
绝缘栅双极晶体管
开关类型的元器件
开关频率可以实现每秒上万次的通断
可以将直流电转换成交流电
工作原理
通过打开或关闭栅极G来打开或者关闭,给G极高电平就会导通,低电平就会截止
优势:低驱动电流,低导压降
关键字:GCE G用来导通和截止电流 ,集电极C和发电极E用来导通电流